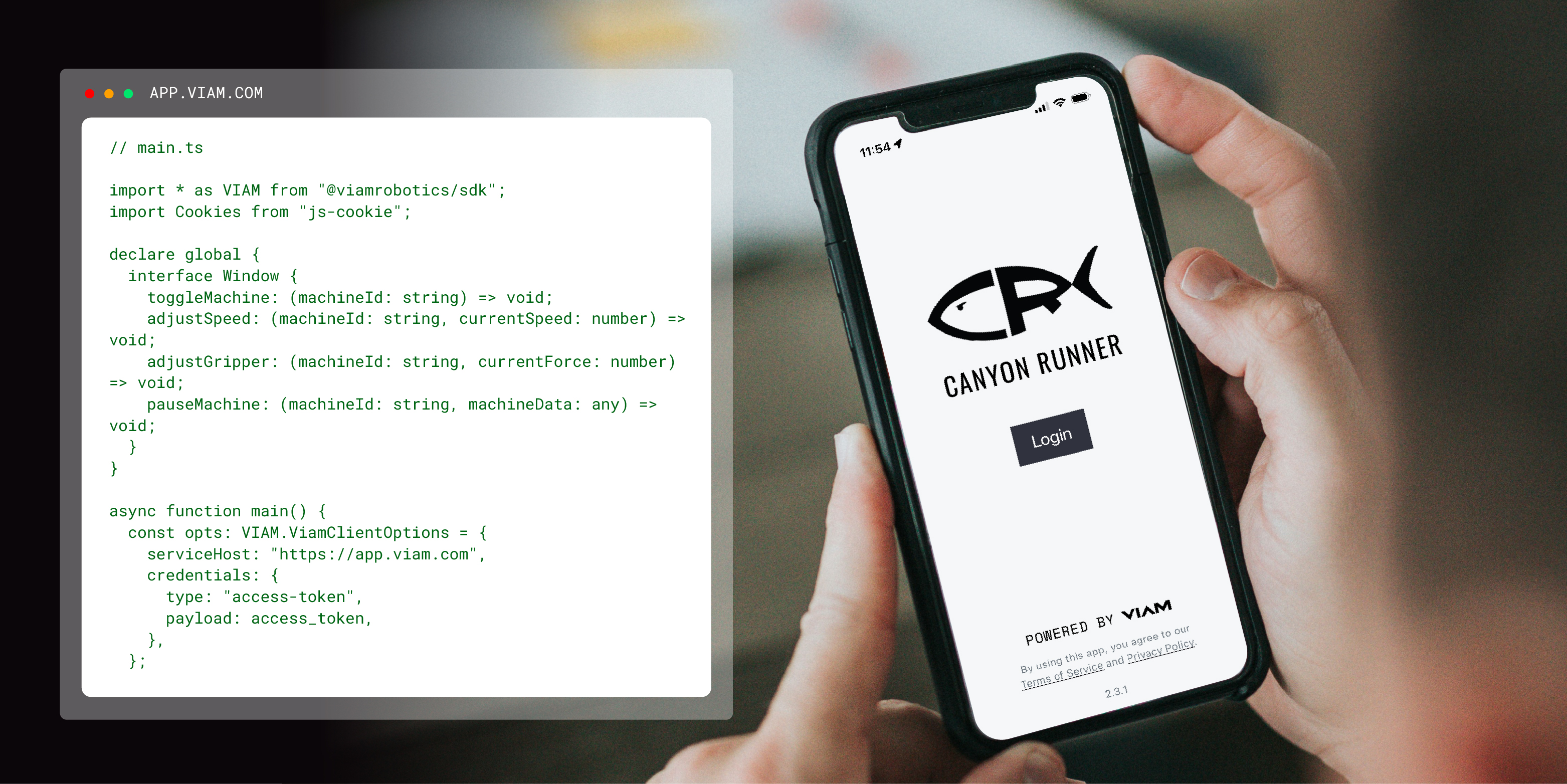
Build robots like you build software
For most software engineers, robotics means wrestling with proprietary drivers, complex networking, and low-level C++. Viam is a unified software layer that abstracts away the hardware, networking, data management, and more, so you can build and manage robots with the workflows you already know.